
技術情報
知っていると便利な光学知識 -
被写界深度と過焦点距離・過焦点系列
はじめに
この技術資料の読者の皆様は,マシンビジョンのみならずカメラで撮影を行う際に,一度は“被写界深度”について何らかの疑問をお持ちになったことがあると思います。
“被写界深度”は,撮影画像においてピントがぼけていないと見做せる距離幅のことで,これについてはインターネットや市販されている写真技術書,業界誌などに数多く情報が紹介されています。また弊社では“知っておきたいレンズの基礎~レンズ選定編~”,及び“マシンビジョンにおける被写界深度の考え方”として,一般的な写真業界とは異なる視点で解説した技術資料をWebサイトに掲載しています。
さて本稿では,更に知っていると便利な光学知識として,“被写界深度”と,これに深く関係するもののインターネット情報でもあまり見かけることのない“過焦点距離”,及び”過焦点系列“について解りやすく説明いたします。
1. 被写界深度
“被写界深度”については,先ずは弊社Webに掲載の技術資料“知っておきたいレンズの基礎~レンズ選定編~”,及び“マシンビジョンにおける被写界深度の考え方”を参照戴きたいのですが,ここでは改めてその概要と,補足事項についてご説明いたします。
1.1. 被写界深度とは
“被写界深度(Depth of Field)”とは,撮影した画像内でピントがぼけていないと見做せる撮影距離の幅のことを云います。
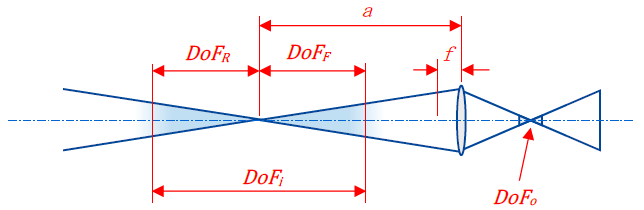
撮影する際は,任意の撮影距離にピントを合わせて撮影しますが,そのベストピントの位置に対して手前側にピントが合って見える範囲を“前側被写界深度”,奥側にピントが合って見える範囲を“後側被写界深度”と云い,両方を合わせた幅を“被写界深度”と云います。
なお被写界深度は,後述するように計算で求めることができますが,撮影対象物の大きさ,表面パターンなどの性状や撮影レンズの収差でも見え方が異なることから,計算で得られたある閾値を境に明確に合焦・ピンぼけが区別されるものでは無く,程度の差こそあれ漸次的に変化するものとお考えください。
1.2. 許容錯乱円径と焦点深度
“被写界深度(Depth of Field)”は,撮像センサ側の結像状態からなる“焦点深度(Depth of Focus)”と共軛の関係にあります。英略語ではどちらも“DoF”となり混乱しますので,本稿では“被写界深度:DoFi”と“焦点深度:DoFo”と分けて表記いたします。
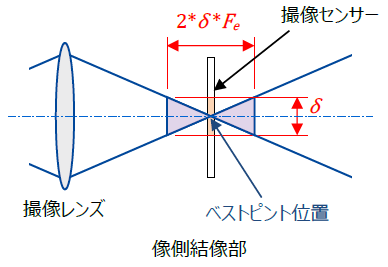
“焦点深度DoFo”は,撮像センサ上にピントを合わせた際に,センサ近傍でピントがぼけていないと見做せる光軸方向の幅で”許容錯乱円径δ“,及び“実効F値Fe”から求められます。

- DoFo:焦点深度
- Fe:実効F値
- δ:許容錯乱円径(CoC とも表記される)
レンズにより点が結像された際の円形の像のことを“錯乱円(Circle of Confusion)”と云いますが,撮像センサがぼけとして認識できない最小の大きさを特に“許容錯乱円径(Permissible Circle of Confusion,単にCircle of Confusionとも)”と云います。
この“許容錯乱円径δ“については,デジタルカメラが主流である今日においても銀塩フィルムと同様の許容錯乱円径の値(例えば画面対角線の1/1300である0.033 mmなど)がインターネット上の情報などで一般的に使われているようですが,これは“ある大きさの印画紙にプリントし,ある距離において目視で鑑賞する”ことを前提とした値です。これに対し,撮像センサの各画素の輝度値で処理・判断を行うマシンビジョンにおいては, “許容錯乱円径”は撮像センサの“画素ピッチ”,あるいは“エアリーディスク径”と云われるレンズの光学的な結像限界で求めることにし,白黒カメラの場合は“画素ピッチPpix”,あるいは“エアリーディスク径DAiry”の大きい方を“許容錯乱円径δ ”とします。(オンチップカラーフィルターがベイヤー配列のカラーカメラの場合は,一般にδの2~3倍の値を使用しています。)
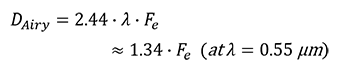
- DAiry:エアリーディスク径
- λ:波長
なお焦点深度については,本来ならばレンズの像面彎曲など各収差を考慮し検討せねばならないのですが,一般にはそこまでの精度は不要なことから,光軸上のみでの算出により検討を行います。
また前記の方法で求めた値は精度的に最も厳しい値になり,実際の用途では適宜緩和して使用できます。(弊社技術資料“マシンビジョンにおける被写界深度の考え方”などを参考にしてください。)
1.3. 被写界深度と光学倍率
“被写界深度”についてインターネットなどで調べると,その性質として下記のことが示されています。
- ① F値(F)が大きいほど(絞るほど)深度は深くなる
- ② 焦点距離(f)が短いほど(広角なレンズほど)深度は深くなる
- ③ 被写体の距離が遠いほど深度は深くなる
- ④ 前方の深度より後方の深度の方が深い
もちろんこれらの性質は正しいのですが,異なるセンササイズのカメラを使用し同じ画角を得ようとすると,異なる焦点距離のレンズを使用することもあり,前記の説明では,どちらの被写界深度が深いのかなど判断しにくいこともあるかと思います。
実は,“被写界深度”は“光学倍率”と関係があり,マシンビジョン用光学系のように撮影距離が近く比較的高倍率の場合は,
⑤ 光学倍率,及びF値が同じ,且つ同じ画素ピッチのセンサの条件ならば被写界深度は同じ
と考えて差し支えありません。
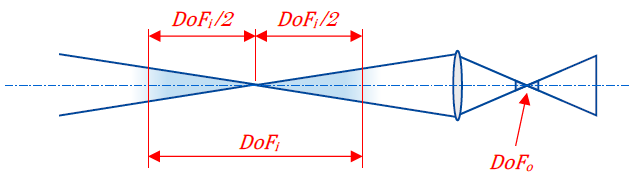
前項にて,被写界深度は焦点深度と共軛の関係にあると述べましたが,像面が片側焦点深度分だけ移動した場合の物側変化量が,これに相当する片側の被写界深度となります。このように像面が微小に移動したときの物側(被写体側)のピント位置は,像面側移動量を(光学倍率の一つである)縦倍率αで割った分だけ移動します。この場合,焦点深度は像面に対し前後均等の量ですので被写界深度も前後で同じという結果になります。
これに対し,焦点深度の近点・遠点で光学倍率差が大きい場合はこの影響により上記③,④のように前後で深度が変わってきます。計算方法については次項に示しますが,マシンビジョンなど比較的撮影距離が近い場合は光学倍率による式を,撮影距離が遠い場合は被写体距離を含めた式を用いることをお薦めします。
1.4. 被写界深度の求めかた
ここでは“被写界深度”を求める方法として,三通りの式を示します。
【1】 光学倍率を用いた式
マシンビジョンでは,例えば300 mmなど比較的近い撮影距離での使用が多いのですが,このような近接撮影の際は,光学倍率を用いて被写界深度を求めることができます。前項では光学倍率のうちの縦倍率αで説明しましたが,縦倍率αと横倍率βとはα=β2の関係がありますので,一般的な光学倍率である横倍率βを用いて被写界深度を求める式も併せて示します。
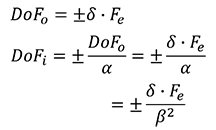
- DoFo:焦点深度
- DoFi:被写界深度
- f:焦点距離
- Fe:実効F値
- α:光学倍率(縦倍率)
- β:光学倍率(横倍率)
- δ:許容錯乱円径(CoC とも表記される)
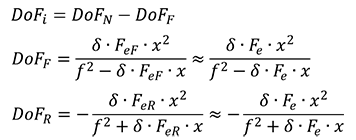
【2】 ニュートンの結像公式による式
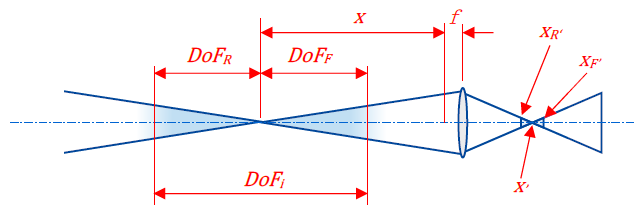
焦点基準の被写体距離xを用いて求める公式です。
ニュートンの結像公式を用いる場合は,被写体距離xの座標は前側焦点を原点とし,通常の撮影では像と反対側の方向を示す意味で負の値をとります。
また前側被写界深度DoFFは正の値をとりますが,後側被写界深度DoFRは負の値となります。被写界深度DoFiは幅を示すので絶対値とします。
なお実効F値には,焦点深度の近点,及び遠点での光学倍率で求めた値FeN,FeFを用いますが,一般的用途では,被写体距離xに対応する光学倍率から求めたFeに置き換えても実用上構いません。
- DoFo:焦点深度
- DoFi:被写界深度(絶対値)
- DoFF:前側被写界深度(正号)
- DoFR:後側被写界深度(負号)
- f:焦点距離
- Fe:xにおける実効F値
- FeF:前側深度時(近点)における実効F値
- FeR:後側深度時(遠点)における実効F値
- δ:許容錯乱円径(CoC とも表記される)
- x:被写体距離(前側焦点より)
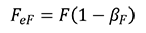
実効F値のFeF,FeRは次の方法で求めます。
任意の撮影距離xと繰出し量x’はニュートンの式により

前側被写界深度DoFF,及び後側被写界深度DoFRの端となる近点,及び遠点に対応する繰出し量xF’,xR’はxに対する実効F値Fex(本文中ではFe)を用いて
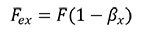


ここで改めてxF’,及びxR’における横倍率βF,βR,及び実効F値FeF,FeRを求める。


- f:焦点距離
- Fe:実効F値
- Fex:xにおける実効F値(=Fe)
- FeF:前側深度時(近点)における実効F値
- FeR:後側深度時(遠点)における実効F値
- βx:xにおける横倍率
- βF:前側深度時(近点)における横倍率
- βR:後側深度時(遠点)における横倍率
- δ:許容錯乱円径(CoC とも表記される)
- x:被写体距離(前側焦点より)
- xF:前側深度時の被写体距離(前側焦点より)
- xR:後側深度時の被写体距離(前側焦点より)
- x’:繰出し量
- xF’:前側深度時の繰出し量
- xR’:後側深度時の繰出し量
【3】 ガウスの結像公式による式
ガウスの結像公式(一般的な1/(-a)+1/b=1/fいうもの)は,主点基準の被写体距離aを用いて求める公式です。
式としては,前項のニュートンの式に対し被写体距離の値が撮影レンズの焦点距離fだけ長くなるだけですので,前項の式のxをa+fに置換すれば容易に求められます。
被写体距離aの座標は前側主点を原点とし,通常の撮影では像と反対側の方向を示す意味で負の値をとります。
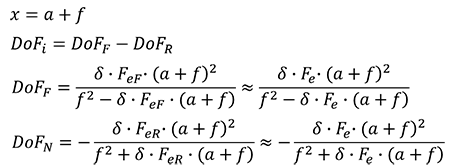
- DoFo:焦点深度
- DoFi:被写界深度(絶対値)
- DoFF:前側被写界深度(正号)
- DoFR:後側被写界深度(負号)
- f:焦点距離
- Fe:実効F値
- δ:許容錯乱円径(CoC とも表記される)
- a:被写体距離(前側主点より)
2.過焦点距離
2.1. 過焦点距離とは
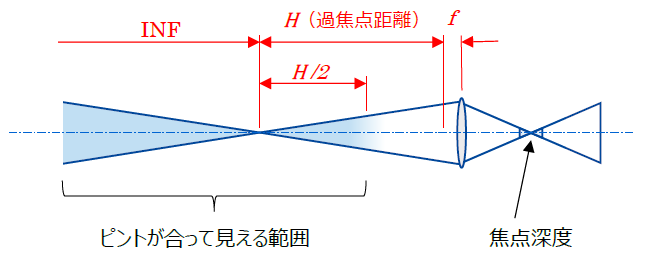
“過焦点距離(Hyperfocal Distance)”は,この距離(H)にピントを合わせると,無限遠からH/2の距離まで被写界深度となる撮影距離のことです。
2.2. 過焦点距離の求めかた
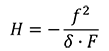
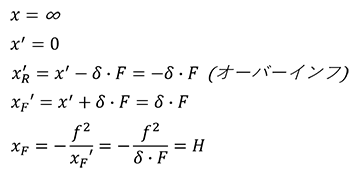
この過焦点距離は,次式のように無限遠にピントを合わせたとき(x=∞,x’=0)の前側被写界深度に相当します。(ここでは繰出し量x’に着目しますので,ニュートンの式を用いて計算します。)
なお過焦点距離を計算する際は,光学倍率が決まっていませんので実効F値(Fe)ではなく(光学倍率を含まない,無限遠に対する)F値(F)を用います。
- H:過焦点距離
- f:焦点距離
- F:F値
- δ:許容錯乱円径(CoC とも表記される)
- x:被写体距離(前側焦点より)
- xF:前側深度時(近点)の被写体距離(前側焦点より)
- xR:後側深度時(遠点)の被写体距離(前側焦点より)
- x’:繰出し量
- xF’:前側深度(近点)時の繰出し量
- xR’:後側深度(遠点)時の繰出し量
3. 過焦点系列
3.1. 過焦点系列とは
“過焦点系列(Hyperfocal Sequence(HS))”は,過焦点距離を元に求めた値を並べることで,ピントの合う範囲を一覧できるようにした数列のことです。
3.2. 過焦点系列の求めかた
過焦点系列(HS)は,過焦点距離H,H を2で割った値,3で割った値……と整数nで割った順に並べた数列です。

過焦点系列は,数列に示される数にピントを合わせたときの両隣が被写界深度の遠点と近点を示しています。
例えば過焦点距離“H”にピントを合わせると,被写界深度の遠点は“無限遠(∞)”,近点は“H/2”となります。
前項で示したように,無限遠にピントを合わせた場合は,遠点はオーバーインフとなり無限遠のままですが,近点は“H”,即ち過焦点距離となります。
なお過焦点距離Hを整数nで割ることは,無限遠時の繰出し量x’ に対して,焦点深度の半分(=δ *Fe)のn倍だけ合焦点が光軸上を移動することを意味しています。
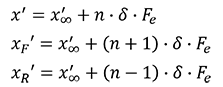
- x’:繰出し量
- xF’:前側深度(近点)時の繰出し量
- xR’:後側深度(遠点)時の繰出し量
- n:整数
3.3. 無限遠側撮影での例
近年,監視カメラ領域であった遠景撮影画像に対しても,照明と同期したトリガー制御撮影など,マシンビジョンカメラの特性を生かした撮影,画像処理が行われるようになりました。
ここでは,一例として550 nmの波長において,画素ピッチが3.45 μmのカメラ,及びf=50 mm,F2レンズを使用したときの被写界深度について,過焦点系列を用いて検討します。
先ず,計算に必要なカメラ,及びレンズの仕様を示します。
- (1) 波長: λ=550 nm=0.55 μm
- (2) 画素ピッチ: PPix=3.45 μm
- (3) 焦点距離: f=50 mm
- (4) F値: F=2
“許容錯乱円径δ”は“画素ピッチPpix”,あるいは“エアリーディスク径DAiry”の大きい方ですので,ここでDAiry,及びδを求めます。
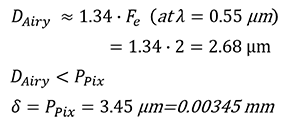
よって,過焦点距離Hは

過焦点系列はHを整数で割った値となりますが,ここではH~H/5を表で示します。
(単位はmm,方向を示す負号は省略します。)
| INF | H | H/2 | H/3 | H/4 | H/5 |
|---|---|---|---|---|---|
| ∞ | 362,318.8 | 181,159.4 | 120,772.9 | 90,579.7 | 72,463.8 |
過焦点距離H=約362.3 mにピントを合わせた場合は,上表に示す両隣の範囲が被写界深度となり,遠点が無限遠INF(∞),近点がHの半分であるH/2=約181.2 mとなることを示しています。またH/3=約120.8 mにピントを合わせると,被写界深度は遠点が約181.2 m,近点が90.6 mになります。
3.4. 近接撮影での例
マシンビジョンでは,撮影距離が短い近接撮影が多いかと思います。ここでは前項の条件で,比較的近い距離の過焦点系列を示してみます。
| H/361 | H/362 | H/363 | H/364 | H/365 | H/366 |
|---|---|---|---|---|---|
| 1003.653 | 1000.881 | 998.124 | 995.381 | 992.654 | 989.942 |
この場合も前項同様に,ピントを合わせた距離の両隣に値が被写界深度の遠点,及び近点を示すことになりますが,かなり幅が狭くなっている,即ち被写界深度が浅いことがお判りかと思います。
なお近接撮影のように光学倍率が大きくなってきますと,本過焦点系列表の値と2.4項に示した被写界深度の計算結果とで誤差が大きくなりますので,本系列表は検討初期段階の概算値を求める際に活用戴くことをお薦めします。
(参考文献: 吉田正太郎. カメラマンのための写真レンズの科学. 地人書館. 1997)